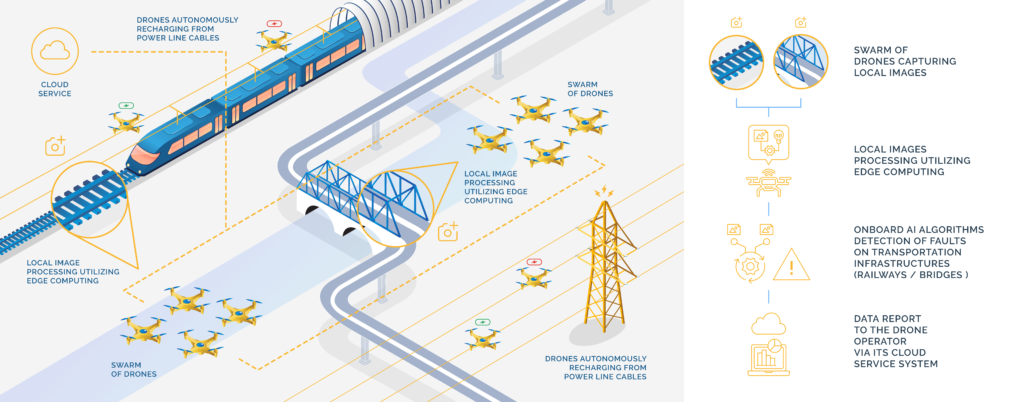
The aim of Drones4Safety (D4S) is to develop a system of autonomous, self-charging, and collaborative drones that can inspect a big portion of transportation infrastructures in a continuous operation.
Download the Drones4Safety assets in 3d model ready to be print!
Harvesting energy from overhead power or rail lines in the proximity of the infrastructure to be inspected to operate the drones for a longer time.
Inspection efficiency
Improving an Al algorithms to recognize infrastructure components and discover automatically eventual faults on assets.
Failsafe Inspection
Producing a safe operational system resisting harsh electromagnetic environments and the effects of high-voltage/ high-current signals.
Collaborative system
Validating a collaborative and centralized drone system to inspect different sides of the desired infrastructure.
Autonomous Navigation
Providing a drone system monitoring and controlling remotely the state and location of the drone.
consortium
The consortium represents the full value-chain for the development of an autonomous, self-charging, collaborative drone system for inspecting transport infrastructures.
The project is also supported by a team of professional having knowledge and expertise in UAS, AI, railway and bridge inspections. Visit the Advisory Board page for more information.
36
MONTHS DURATION
3.5
MILLIONS EUROS BUDGET
9
PROJECT PARTNERS
5
EU MEMBER STATES REPRESENTED
NEWS
WANT TO KNOW MORE ABOUT OUR PROJECT?
CONTACT US
GET SOCIAL
WATCH THE VIDEO
PROJECT COORDINATOR Prof. Emad Samuel Malki Ebeid University of Southern Denmark esme@mmmi.sdu.dk
DISSEMINATION MANAGER Damiano Taurino Deep Blue srl damiano.taurino@dblue.it